Projects
Robotic Design Studio (RDS)

Our group design an uneven bar gynmastic robot:
- Complete mechanical and electrical design of a three link robot
- Top link is “hand”, use pancake motor driven by ESC to grab the bar
- Middle part is “muscles”, contains two brushless motors driven by amplifier to rotate between links
- Bottom part is “brain”, contains E-stop, battery, Relay, two Roboteq amplifier.

- MatLab simulation of Giant Swing and release-catch
- Use Euler-Lagrange equations to build the frame of a triple pendulum, simulate the swing and collision phase
- Use energy-shape controller to pump up the robot
- Use the position and velocity of the centroid to determine the time of releasing
Pose Tracker


Design a rotating camera to track human movement and evaluate posture
- Components: ESP CAM, Mini Pan-Tilt Kit, and FTDI
- Algorithm: PoseNet, tensorflow.js
- Use visual angle to track movements that increase robustness.
Glossy Percpetion
Use statistics to understand glossy perception
- use subband analysis and histogram manipulation (s-curve, λ-curve) to estimate the glossiness of texture
- find the relations of subband histogram with generalized Gaussian function of textures

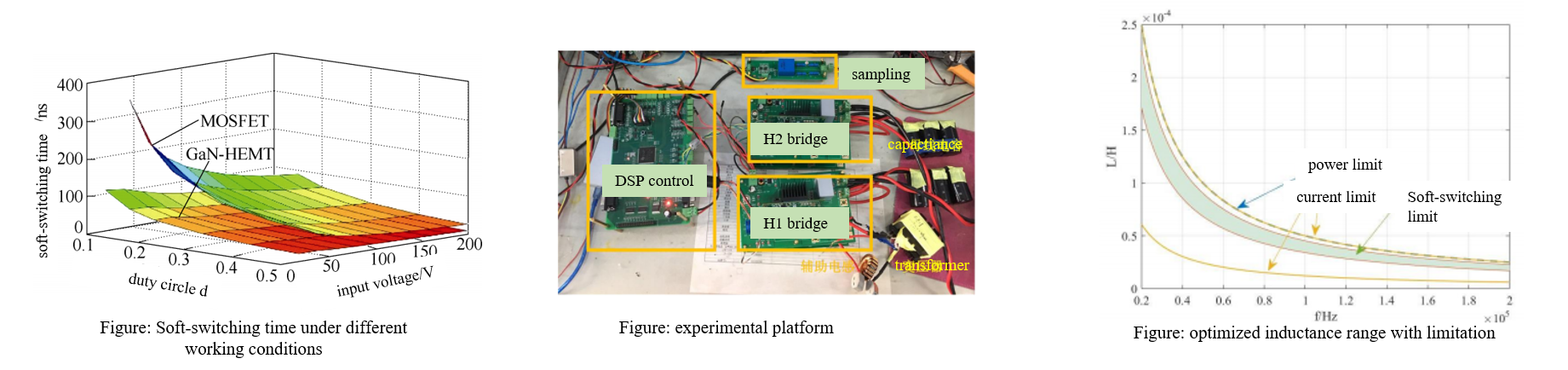
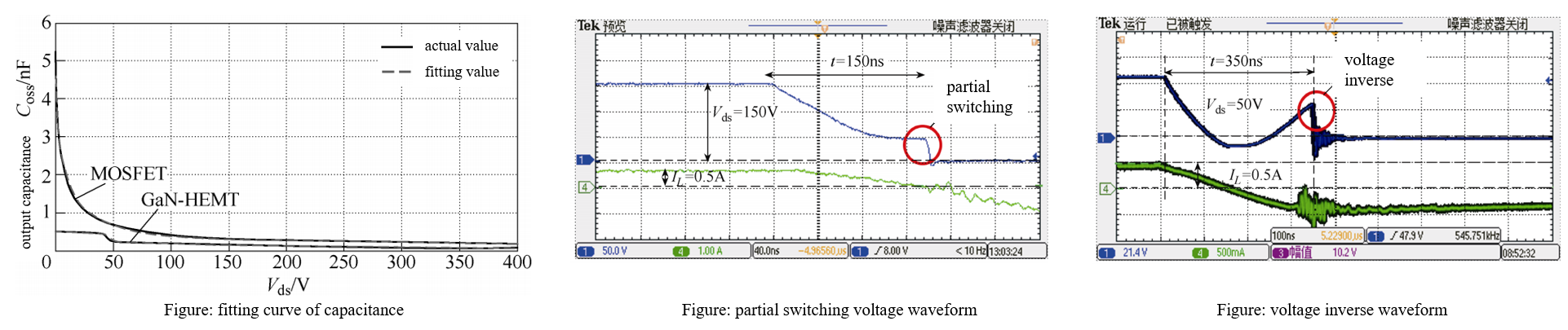
GaN-HEMT performance on DC-DC converter
- Soft-switching time calculation
- Established a mathematical model by constructing an accurate numerical fitting function that characterizes the relationship between voltage and parasitic capacitance
- Investigated partial soft-switching with insufficient time and voltage inverse with abundant deadtime
- construct power loss model with negative voltage turning-off feature of GaN-HEMT
- Established power loss model with frequency and voltage range
- optimized inductance and transformer ratio under wide voltage range and frequency
- compared power loss, soft-switching range of MOSFET and GaN-HEMT